AudioReach Engine
Introduction
This page walks through the high-level software requirements and design details of the AudioReach Engine (ARE) used in the context of the AudioReach™ architecture. Refer to Acronyms and terms for definition of acronyms used in this page
Overview
High-level architecture
ARE follows client-server model where a server provides various functionalities, like realizing audio use cases, per the client requirements.
The server framework provides the methods to plug in and execute algorithms per the use case requirements.
The client framework acts as bridge between the high-level software stack (like middleware or application) and server framework.
The platform (hardware subsystem) and operating system (OS) abstraction help the framework to work on different processors and hardware architectures.
Below figure illustrates the high-level software architecture used in typical audio embedded systems.

High-level audio software architecture
Possible use cases
The ARE can be used in various audio and voice use cases. This section includes, but is not limited to, the following high-level examples. Detailed use cases are illustrated in Use cases section.
Audio capture and recording
Audio capture involves the encoding of PCM data coming from a mic or any real-time device (end-point).
Audio formats used for encoding are: PCM, AAC, WMA std, AMRWB, and so on.

Audio renderer and playback
Audio playback involves the decoding of given audio data, and playing the PCM on a speaker or any real-time device.
Typical audio formats used for decoding are: PCM, MP3, AAC, FLAC, ALAC, AC3, EAC3, Vorbis, WMA std, WMA Pro, DTS, APE, and so on.

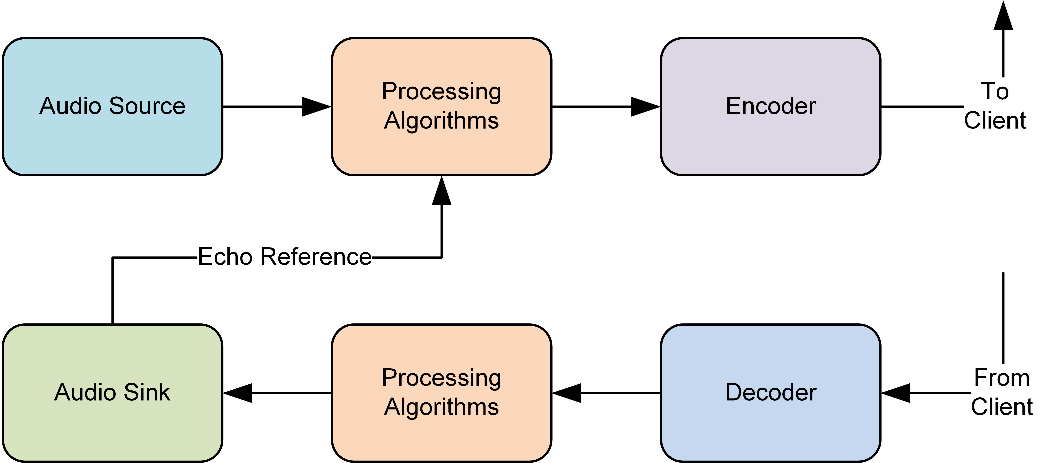
Voice over IP (VoIP)
Voice over Internet Protocol (VoIP) involves both playback and record paths simultaneously, and it is used for voice communication.
Encoder and decoders interact with the host processor application that transmits and receives the data over IP during a conversation with the far-end user.
Typical audio formats used for encoding and decoding are: PCM, AAC, A-law, µ-law, and so on.
Audio transcoding
Audio transcoding involves converting one audio format to another. For example, from MP3 to AAC.

Audio loopback
Audio loopback involves receiving the data from one audio source and rendering it on an audio sink after optional processing.
An audio loopback is used in various scenarios like mixing the side tone in CS voice call, a hands-free profile (HFP), a hearing aid, and so on.
Following are some loopback use cases, where audio must be routed from one device to another device with some conversions.
PCM to compressed packetized. For example, PCM coming in from a device is encoded as DTS and packetized before transmitting to HDMI.
Compressed packetized to PCM. For example, data coming from HDMI is depacketized, decoded, and transmitted to a speaker for rendering.
Compressed packetized to compressed packetized with format conversion.

Audio detection
Audio detection involves receiving the data from an audio source, processing it to improve the signal quality, detecting the intended attribute or event, and informing the registered clients.
Audio detection is used in various scenarios like DTMF detection, keyword detection, audio context detection, and so on.

Framework requirements
General
Must be processor and platform agnostic.
Must be use case agnostic and data driven.
Must provide memory scalability options.
Must provide an option to customize the framework.
Must provide an option to support various performance modes.
Must allow use case-specific customizations.
Must support the unified interfaces to the modules (algorithms and functionality) to interact with the framework.
Must be scalable to support standalone use cases up to high-end concurrencies.
Should provide the options to dynamically load the processing modules and algorithms.
Must support multi-core and multi-Instance configurations to enable distributed audio processing.
Client interfaces
Must support client-server communication in the same processor, across the processors, or across the processing domains.
Must provide the methods to manage shared memory across the client and server framework.
Must provide generalized interfaces (synchronous and asynchronous) to exchange commands, responses, and events between the client and the server framework.
Must provide the methods to set up, configure, start, stop, suspend, and tear down the use case graphs.
Must support run-time calibration and monitoring of the modules.
Must provide the methods to publish the framework and module capabilities, configurations, and calibration interfaces to enable the data driven use case design.
Should allow proxy clients to handle use case-specific customizations.
Processing chains, topologies, and graphs
Must support linear processing graphs (where modules are connected sequentially one by one).
Should support non-linear processing graphs (where modules are connected as directed acyclic graphs).
Must support real time (RT) and non-real time (NRT) audio sources and sinks.
Must support stream-based processing graphs where each stream can contain multiple channels.
Should provide metadata propagation across the processing graphs.
Should support the processing modules that have different frame-size requirements.
Must support the option to run multiple instances of the sample module, and the ability to address individual instances of configuration or calibration.
Must support in-place buffering option for the processing modules in the use case graphs.
Must provide the methods to support data and control communication between the processing modules.
Should provide the support for graph-specific functionalities like pause, resume, and flush.
Should support the modules that take variable input numbers of samples and produce the variable numbers of output samples.
Should provide the methods to notify the client processor when the last sample of the playback stream is rendered out of the audio sink.
Media formats
Must support the fixed and floating point PCM data format.
Must support various standard compressed data formats and the generic (raw) compressed data format.
Must provide support for configuring the number of channels, bit width, sample width, and Q factor.
Must support the media format propagation across the processing modules in the use case.
Scheduling methods
Should support different scheduling modes and different data delivery mechanisms (buffer availability, timer scheduled trigger, timed packet delivery, deadline driven scheduling, and so on).
Should provide options to enable custom scheduling and trigger policies to handle complex scenarios.
Resource management
Must provide the methods to manage the processing resources (memory management, processor cycles, band width, thread priorities, and so on) required for the use case graphs.
Should provide the methods to measure the processing requirements of both the framework and modules.
Should provide the ability to query the delay between required modules.
Must provide the scalable memory requirement options based on the use cases or capabilities.
Debugging
Must provide the methods to log the diagnostic messages.
Must provide the option to log the audio data (PCM and compressed) at specified locations in the use case graphs.
Should support different debug levels (which can be featurizable) to debug complex timing issues, memory leaks, and so on.
ARE components
High-level architecture of the ARE
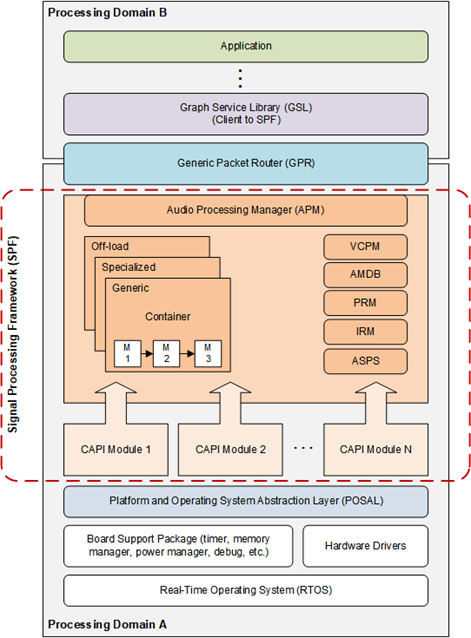
ARE high-level architecture
Functional blocks
This section provides a high-level overview of the functional blocks used in the ARE.
Generic Packet Router (GPR)
The Generic Packet Router (GPR) provides the routing functionality for audio message packets (control, data, events, responses) across the ARE (server framework) and Graph Service Library (GSL; that is, the client framework).
The GPR abstracts the platform-specific interprocessor communication (IPC) transport and protocol layers.
Following figure represents the GPR header format, which consists of source and destination addresses (domain and port), token (useful for asynchronous communication to match the command and response), and operation code (opcode).
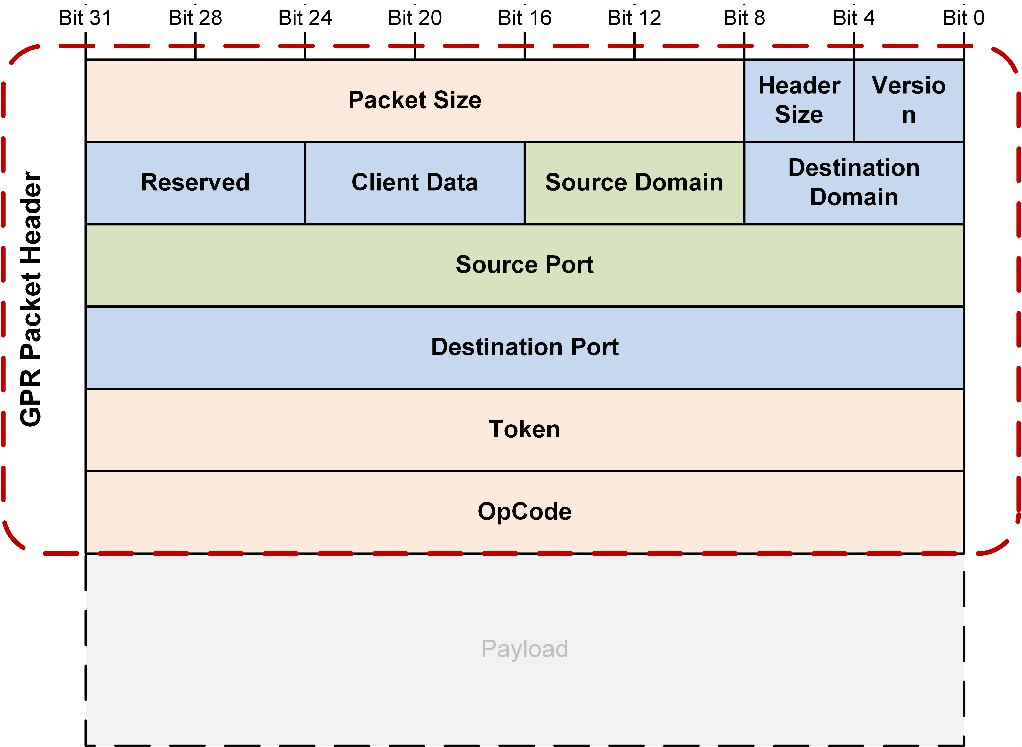
GPR header format
Opcodes
All opcodes are to follow the GUID format.
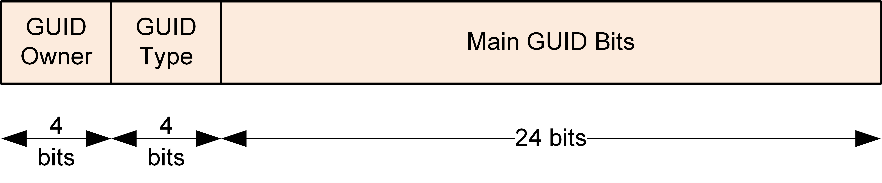
Owner – Indicates the owner of the GUID, that is, whether the GUID is defined by the ARE or your custom opcode.
Type – Indicates the specific purpose, for example, control command, control response, data command, data response, event, module identifier, format identifier, CAPI opcode, and so on.
Bits – Used to interpret the message type as an event or response, and to avoid sending the general response or acknowledgment.
Messaging between ARE and GSL
The ARE supports two types of messaging approaches for optimal system performance: in-band and out-of-band messages.
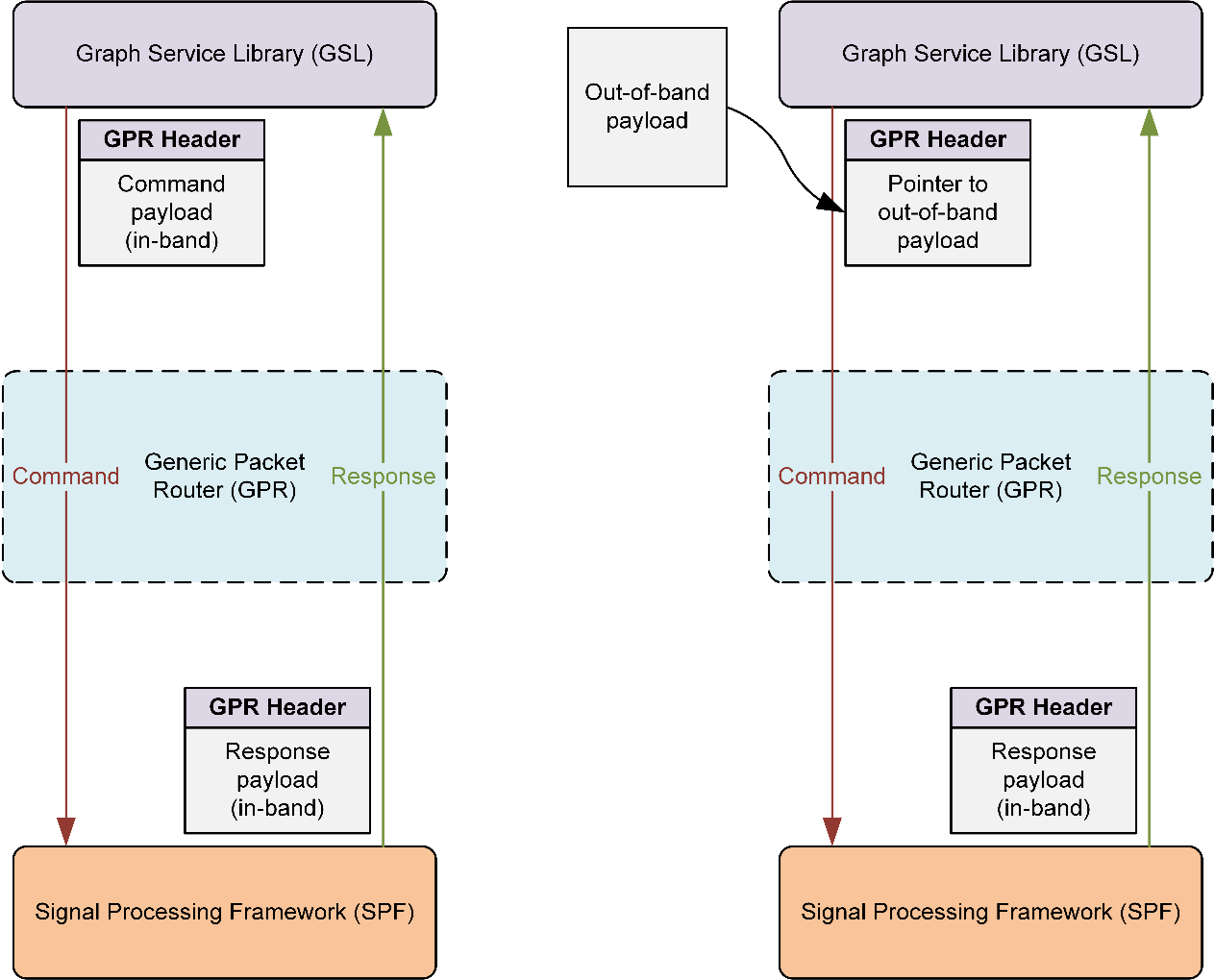
In-band and out-of-band messaging methods
In-band messages
Contain the actual payload/message as part of the GPR payload.
The GPR forwards the full packet (that is, GPR header + actual payload) across the process domains.
Potential memory copies are in intermediate layers between the framework server and client (hence the size limitation to reduce performance impacts).
Typically used for small payloads, such as <512 bytes (platform-specific configuration), like simple commands, responses, events, and so on.
Out of band messages
Use separate shared memory to keep the actual payload/message.
The GPR forwards the packet with the address of the actual payload (that is, GPR address + address of the actual payload).
Allow the framework server and client to access the shared memory without any additional memory copies between them.
Typically used for larger payloads, such as >512 bytes (platform-specific configuration), like configuration, calibration, data buffers, and so on.
Modules
A module is an addressable functionality in the ARE.
A module ID is used to identify the functionality, and it is useful during module instantiation.
A module instance ID is used to identify the instance of the module. It is useful when receiving configuration and calibration information from the clients.
The module instance (a 32-bit instance ID) should register the callback functions with GPR for receiving messages directly from clients.
Two types of modules are used in the ARE: control modules and data processing modules.
Control modules
Control modules provide the public interfaces to the clients (like GSL, Codec Driver, and so on) to control the ARE resources and functionalities (each module acts like service that provides specific functionalities).
The Audio Processing Manager (APM), and Integrated Resource Monitor (IRM) are a few examples of the control modules. These modules are not represented in use case graphs.
Data processing modules
Data processing modules can be static or dynamic, and they are typically wrapped with the Common Audio Processing Interface (CAPI). The CAPI interface acts as the bridge between the framework and core module functionality.
These modules can have zero or more input and output ports. Ports can be control or data, and they are connected to one link at a time (implicit mixing and splitting is not supported at these ports). Modules with zero input and zero output ports are not supported.
Examples of data processing modules include decoders, encoders, postprocessing modules, hardware or software end-points, DTMF generator (source module), DTMF detection (sink module), echo canceller (multi-port module), and so on.
For more details about the CAPI interface, see CAPI Module Development Guide.
Links and connections
Links and connections are used to connect the data processing modules to create the use case graphs or chains. Originating and terminating points of the link are represented by port.
Two types of links are used in the ARE: control links and data links.
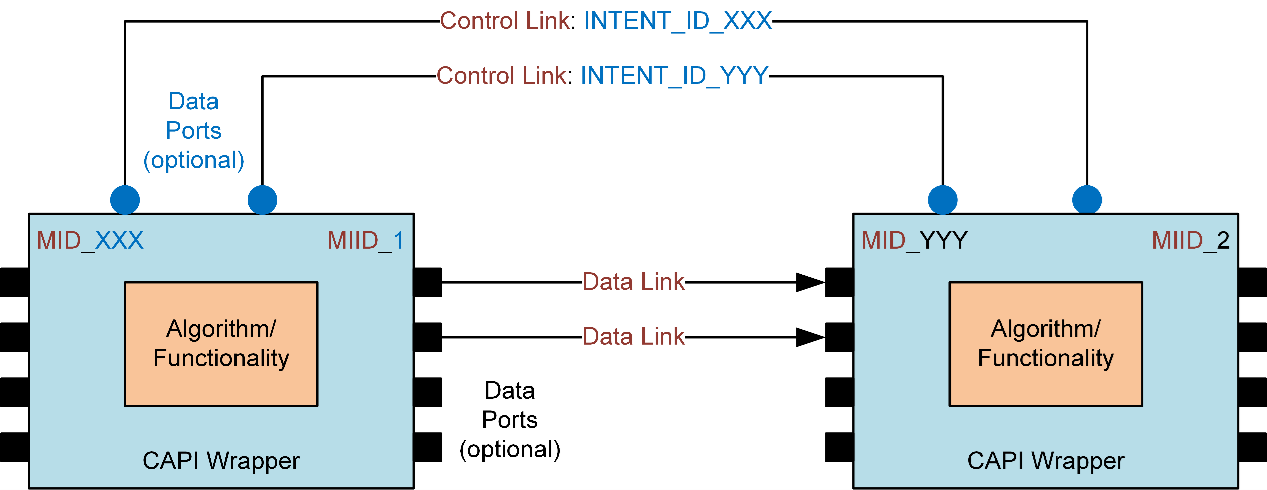
CAPI-wrapped modules with control or data links
Control links
Control links are bi-directional, point-to-point, and dynamic (variable in number) or static (fixed in number with a specific label on the control port).
These links are optional and used in the places where two modules are required to communicate with each other in a steady state without client involvement. They are used for exchanging control messages or intents (that are not required to be synchronous with the data) between the two modules.
Data links
Data links are unidirectional, point-to-point, dynamic (variable in number, for example, input to the accumulator module can be variable), or static (fixed in number with a specific label on the data port, for example, an echo reference port can be marked explicitly).
These links are used for exchanging data messages (that need be synchronous with data buffers or samples) between two modules. Each link carries one stream of data that can contain multiple channels.
Data links are not present on the input side for source modules and the output side for sink modules.
Graph and subgraph
A graph is the interconnection of a list of data path modules (with input and output ports) to achieve an end-to-end use case.
A subgraph is like a graph and is used to represent a section (to control or manage a single unit) of the full graph.
Subgraph properties provide the necessary configuration for managing a subgraph. For example, performance mode (like low power, low latency, and so on.), use case scenario ID (to handle any use case-specific customizations), and so on.
ARE clients control the use cases at a subgraph granularity with the help of graph-specific commands like START, STOP, SUSPEND, FLUSH, and so on.
For specific use cases, graph and subgraph mean the same thing.
The ARE supports directed acyclic graphs (no feedback path) only.
Containers
A container is a framework implementation that helps in executing a group of data processing modules in the same software thread. Following figure illustrates this concept.
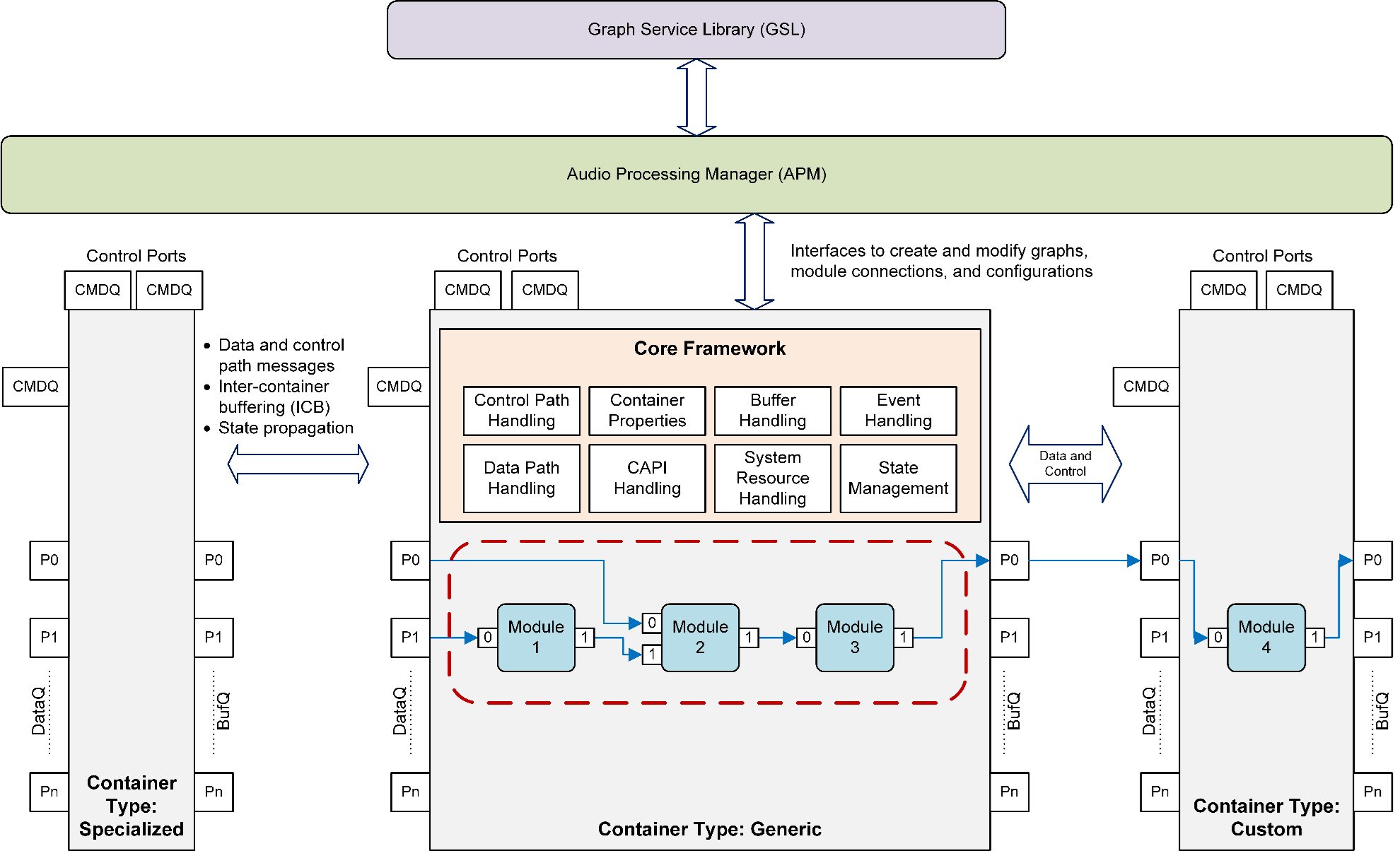
Containers
Each container instance runs in its own software thread.
Container properties provide the necessary configuration for container creation and operation. For example, container type, stack size, heap ID, and so on.
A Container Type helps in identifying the specified container and instantiating it during the use case setup (that is, Graph OPEN).
A Container Instance ID is used to represent the instance of the container type, and it is used in the use case graph definition.
A use case can contain different instances of the same container type to distribute the processing modules in different software threads.
Based on the nature of the framework capabilities required by different use case modules and product needs, there are three container types:
Generic container
Supports hardware end-point/signal triggered modules, shared memory end‑points, encoders, decoders, packetizers, depacketizer, converters, simple PP modules (including fractional resampling and rate matching)
Back-to-back fractional resampling or rate matching are not supported. But individually fractional resampling or rate matching is supported as long as module is connected to the external ports of the container through a non-buffering linear chain.
Priority (EC) sync, EC module and generic sync are supported starting 2022.
Supports low power island
Optimized to run pure signal driven topology.
Threshold aggregation in generic container is as follows:
If there’s only one module with threshold in the container, then that module’s threshold is used.
When multiple threshold modules exist, the LCM (Least Common Multiple) is taken to be the threshold.
If no threshold module is present, then the subgraph performance-mode is used to determine the threshold where performance mode for low power corresponds to 5 ms and performance mode for low latency is 1 ms.
For raw-compressed formats, the threshold in bytes is used as is. Container frame-size is determined by any PCM formats present in the other parts of the graph. If the container is solely on raw-compressed format, then frame size in time cannot be determined and the thread priority setting may not be correct (such scenarios occur rarely and have to be handled on a case-by-case basis)
Example scenarios
If perf-mode is 5 ms (low power) but an end-point module exists that raises the threshold to 1 ms, then the container threshold is 1 ms.
If there are two threshold modules in the container, one with a 2 ms threshold and one with a 5 ms threshold, then the container frame size is the LCM which is 10 ms.
If the subgraph perf-mode is 5 ms and there are no threshold modules, then the container frame size is 5 ms
Specialized container
Mainly designed for PP modules, including complex modules like rate matching and multi-port modules such as EC, which need syncing requirements for multiple inputs. Fractional resampling is also supported.
Back-to-back fractional resampling, rate matching is supported.
End-point/signal triggered modules, shared memory end-points, encoders, decoders, packetizers, depacketizer, and converters are not supported.
Highly optimized for single input and single output (SISO) chain of simple PP modules:
Removal of disabled modules from topo chain.
Removal of sync+SAL from processing chain if only one active input (and limiter is disabled).
Container bypass if all modules are disabled.
Simpler steady state checks when there is no internal buffering in the container (compared to GC - which does this only for signal triggered cases).
Voice call has special sync requirements, which are supported only in SC, such as smart sync, voice proc triggers etc.
Doesn’t support low power island (LPI).
Threshold aggregation in a specialized container is as follows:
If there are multiple threshold modules, SC only supports modules whose thresholds are multiples of each other. If thresholds are not multiples, then it’s an error. If this ‘multiple-threshold’ is smaller than the frame-size derived from subgraph perf-mode, then the closest multiple bigger than the perf-mode-frame-szie is used. Otherwise, the multiple is used as is.
Example scenarios of threshold calculation
If the subgraph perf-mode is low power (5 ms) and the only threshold module in the container raises threshold as 2 ms, then container frame size is 6 ms, which is the closest multiple of the module-threshold which is higher than the perf-mode-frame-size.
If the subgraph perf-mode is low power (5 ms) and two threshold modules are present in the container – one with 1 ms threshold and one raising 3 ms threshold, then the container frame size would be 6 ms. This is the closest multiple of both modules’ thresholds which is higher than the perf-mode-frame-size.
If the subgraph perf-mode is low power (5 ms) and there are no threshold modules, then the container frame size is 5 ms.
If there are two threshold modules in the container, one raising threshold as 2 ms and one raising as 3 ms, then it is an error and SC will not support that topology.
Special cases – For voice call stream-subgraph threshold of 20 ms is used and for audio playback stream-pp, 10 ms is the threshold.
Off-load container
Supports reduction of the processing load on the local process domain by helping to off-load an intended module or a group of data processing modules to a different process domain. This is useful in distributed audio processing for effectively utilizing the available hardware resources across the different processors.
The container concept enables framework customization that allows you to create a custom container if the reference containers do not support the necessary capabilities with the specified performance. Such customizations can be inter-operable with the reference containers if container-to-container interfaces and behaviors are honored.
Containers help with the following:
Managing (setup, start, stop, teardown) the processing chains (topologies) with CAPI modules.
Managing the scheduling and trigger policies for the processing graphs inside the container.
Parallelizing the processing loads in multi-threaded systems.
Sharing the same stack memory across the modules running in that container.
Ensuring the appropriate resource requirements (heap, thread priorities, processor and other infrastructure clocks, and so on) required for the modules.
Managing the data buffering requirements with peer containers through inter-container buffering (ICB) and between the modules in the same container.
Hosting the necessary command queues to interact with the APM, peer containers, external clients, and internal modules for control messaging.
Hosting the data queues and buffer queues to exchange the data path messages (data buffers, metadata, end-of-stream (EOS), media format, and so on) with peer containers.
These queues are created by the containers when the graph is opened.
DataQ is created for every input port of the module that is at the container boundary.
BufferQ is created for every output port of the module that is at the container boundary.
Propagating the port (data and control) state information (start or stop) and nature of the data flow (real time or non-real time) with peer containers through the command queues. This information is useful for updating the scheduling policies at run-time.
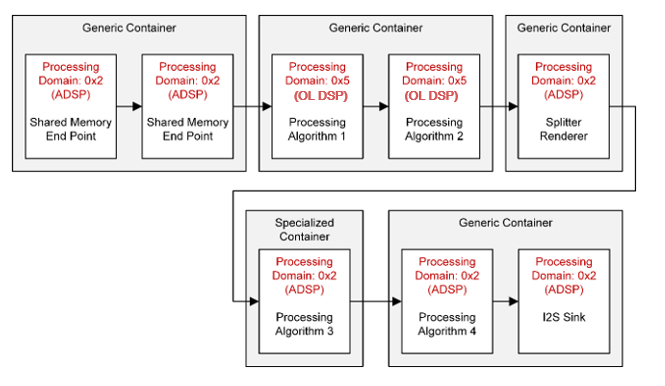
Below figure provides an example dataflow and scheduling policies involved in a simple use case with containers.
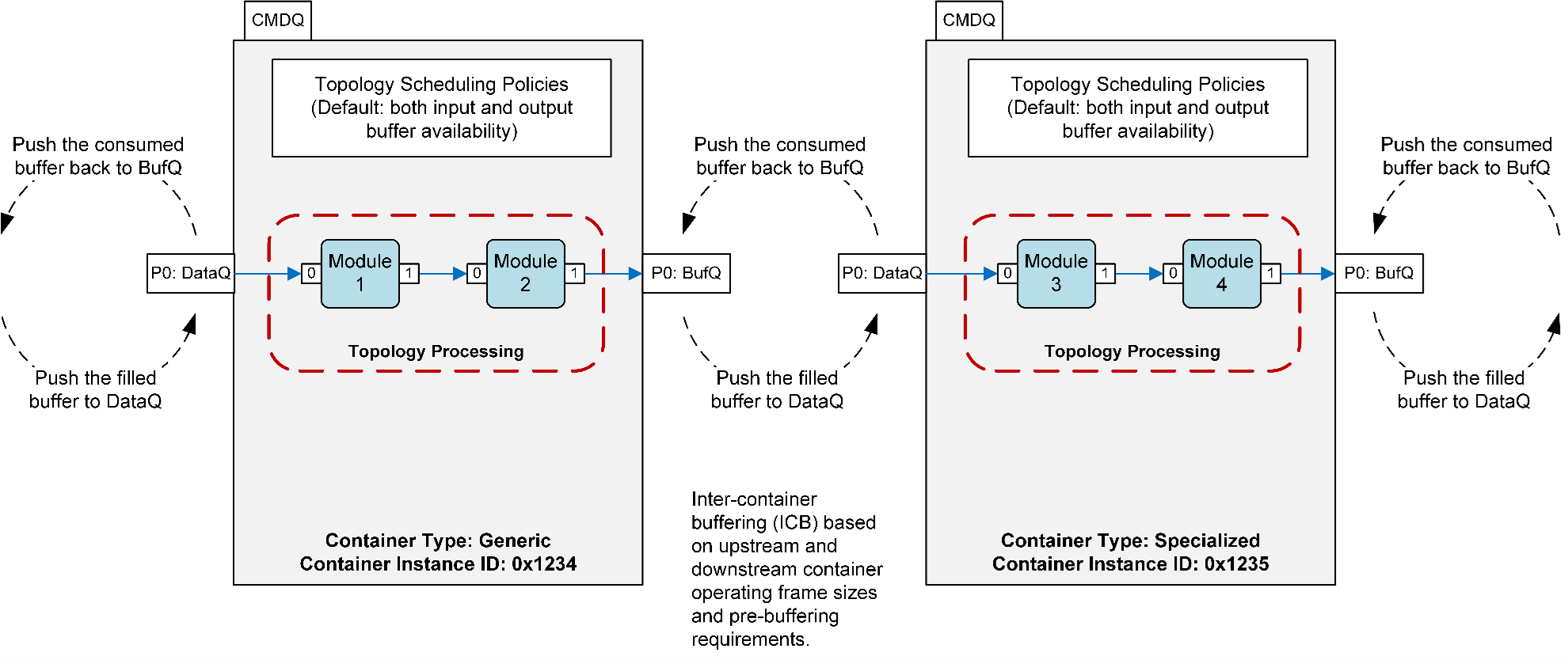
Example dataflow across containers
When the use case is started with the default trigger policy:
The container triggers or calls its topology processing when both input buffers (filled with data from upstream) and output buffers (free buffers) are available.
During the topology processing, input data is propagated through the sequence of CAPI modules (per the use case graph definition) to the output buffer.
After consuming the input buffer completely, the data is pushed back to the upstream’ s output queue (BufferQ).
Once the output buffer is filled, the data is delivered to the downstream container input queue (DataQ).
These steps are repeated at each container that is driven by buffer availability.
The framework also allows the modules to override the default trigger policies by using trigger policy framework extensions. For example, some modules might want to be called whenever input or output buffer is available (such as the buffering type of modules).
Audio Processing Manager (APM)
The Audio Processing Manager (APM) is responsible for setting up and managing the use case graphs in the ARE.
As illustrated in Figure: Audio Processing Manager, the APM provides generic public interfaces to the GSL client for performing the following graph operations:
Set up and configure the container processing threads.
Set up the module’s graph within containers.
Configure and calibrate individual modules within each container.
Update the run-time graph, including adding and removing containers and modules from the graph.
Manage data path connections and disconnection across containers.
Provide run-time calibration of modules within a given container.
Provide shared memory mapping interfaces.
Provide path delay between two modules.
Provide the global framework reset functionality with help of CLOSE_ALL command.
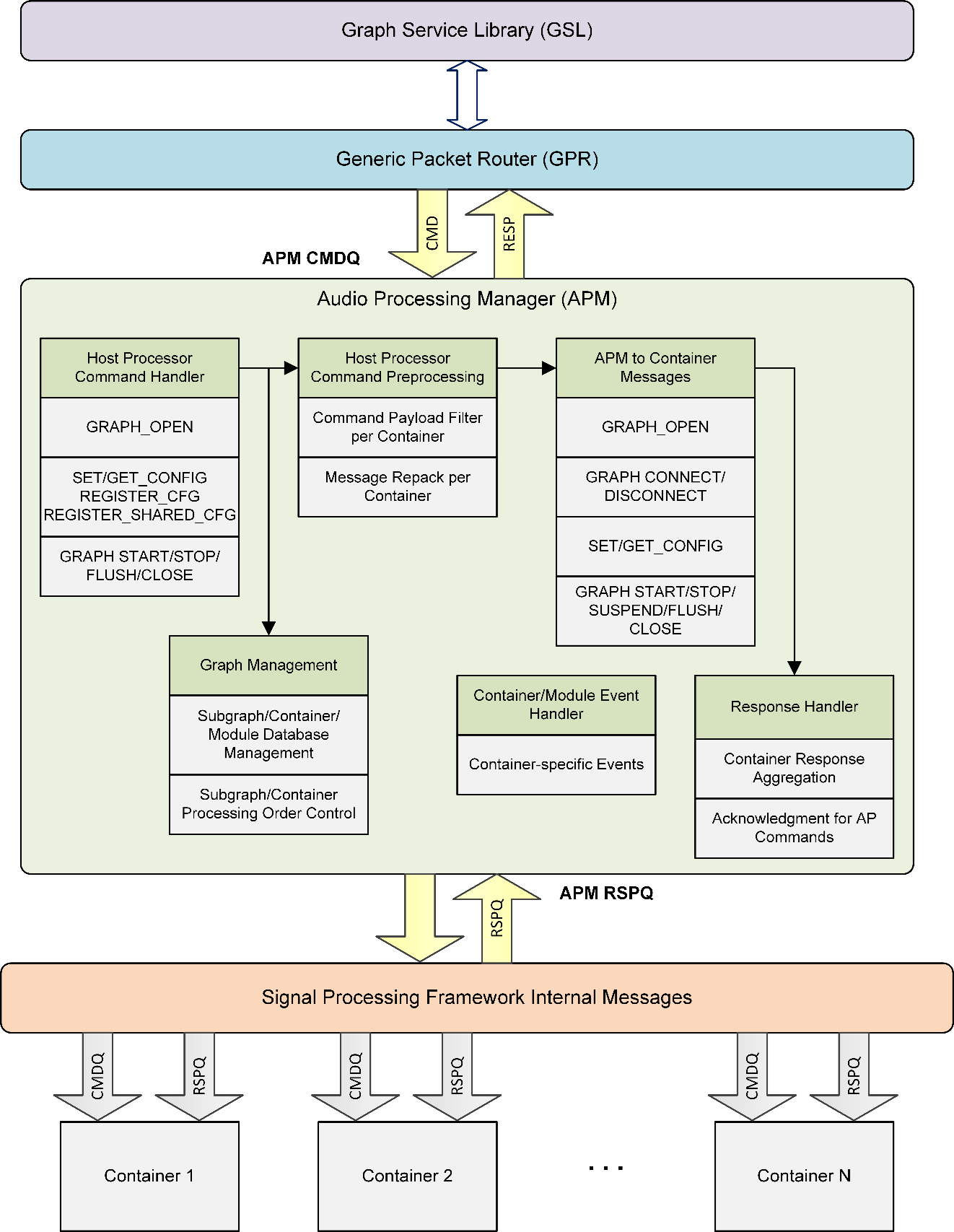
Audio Processing Manager
The APM also handles the commands for controlling a subgraph’s state machine:
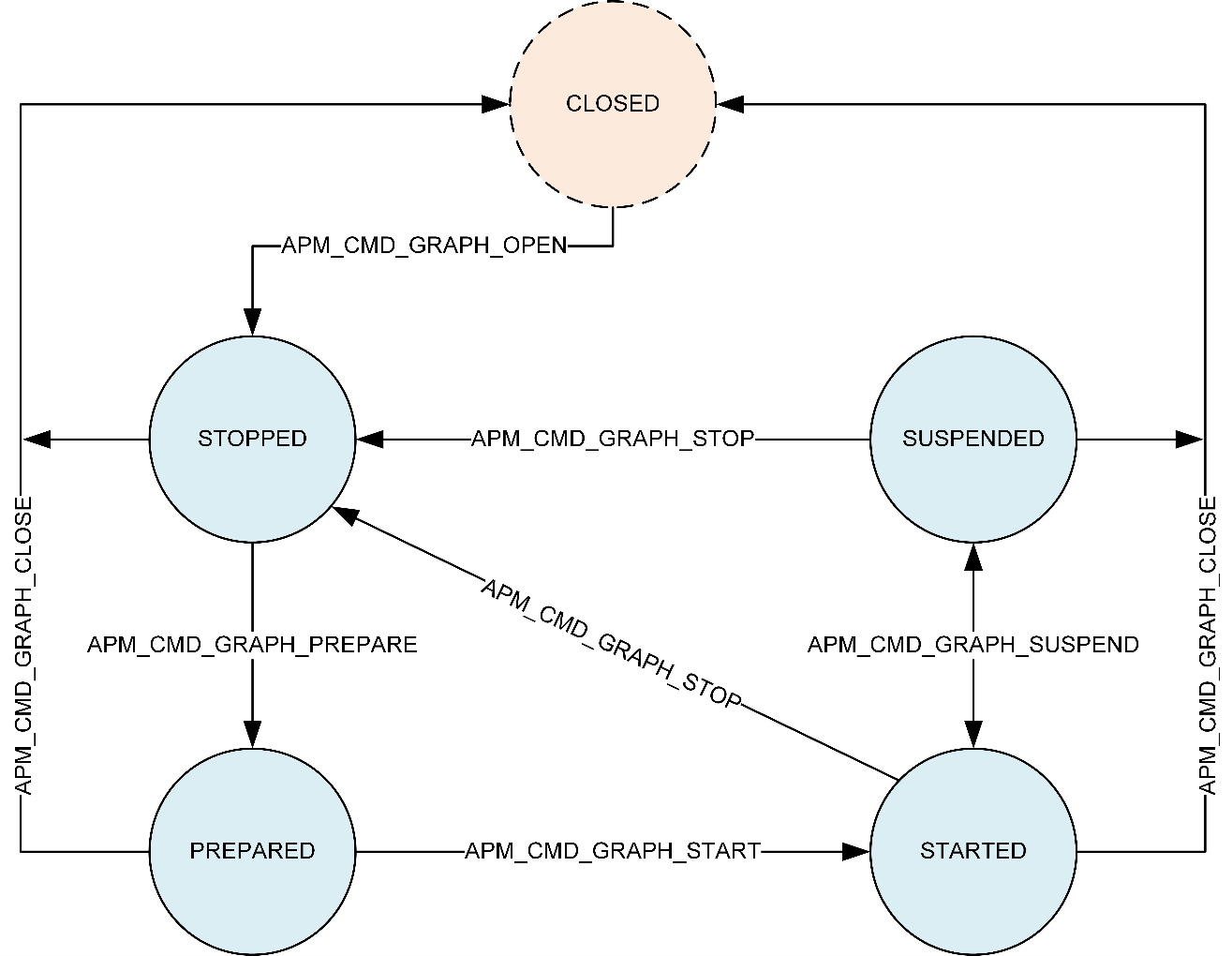
APM state machine
CLOSED
The logical/non-existent graph state before OPEN and after CLOSE.
STOPPED
The state after the graph is opened or transitioned from STARTED as part of STOP.
For a START-to-STOP transition, the module algorithmic state is reset, and the container internal data buffers are flushed.
Platform-specific resources (MIPS, bus bandwidth, and so on) are de-voted.
PREPARED
The media format is propagated through a module topology, if available.
The module applies input media format-dependent calibrations.
STARTED
Platform-specific resources (MIPS, bus bandwidth, and so on) are voted.
When applicable, data triggers, hardware end point, timer interrupts are enabled.
A subgraph is ready for handling the data flow.
SUSPENDED
Platform-specific resources (MIPS, bus bandwidth, and so on) de-voted.
The module algorithmic state and container internal data buffers are maintained and not flushed, unlike the STOP command.
In addition to handling commands from the host processor client, the APM is also responsible for the following operations:
Depending on the type of command, interact with containers via the framework messaging APIs for sending these commands and handle responses from the containers.
For a given command, aggregate the container’s response for the message and send an aggregated acknowledgement back to the GSL.
For a given end-to-end graph, manage and coordinate with containers for use cases (such as rate matching) that involve control path data exchange between modules located across different containers.
This includes utilities for end-to-end container-module graph sorting with respect to data flow direction from the data source to the sink, graph search, and traversal routines.
Audio Module Data Base (AMDB)
The Audio Module database (AMDB) provides the database of CAPI-wrapped modules (both static and dynamic modules) in the ARE.
Audio Module Data Base
The AMDB is responsible for the following operations.
Provide the client (to GSL) interfaces to register or deregister custom modules and load or unload the dynamic modules at boot time or use case boundaries.
Interact with containers for instantiating and tearing down the module.
Use the platform-specific dynamic download utilities for downloading shared objects to the specified memory (DDR, low-power memory, and so on.).
Manage the reference counter so that a module will not be unloaded if it is being used by active use cases.
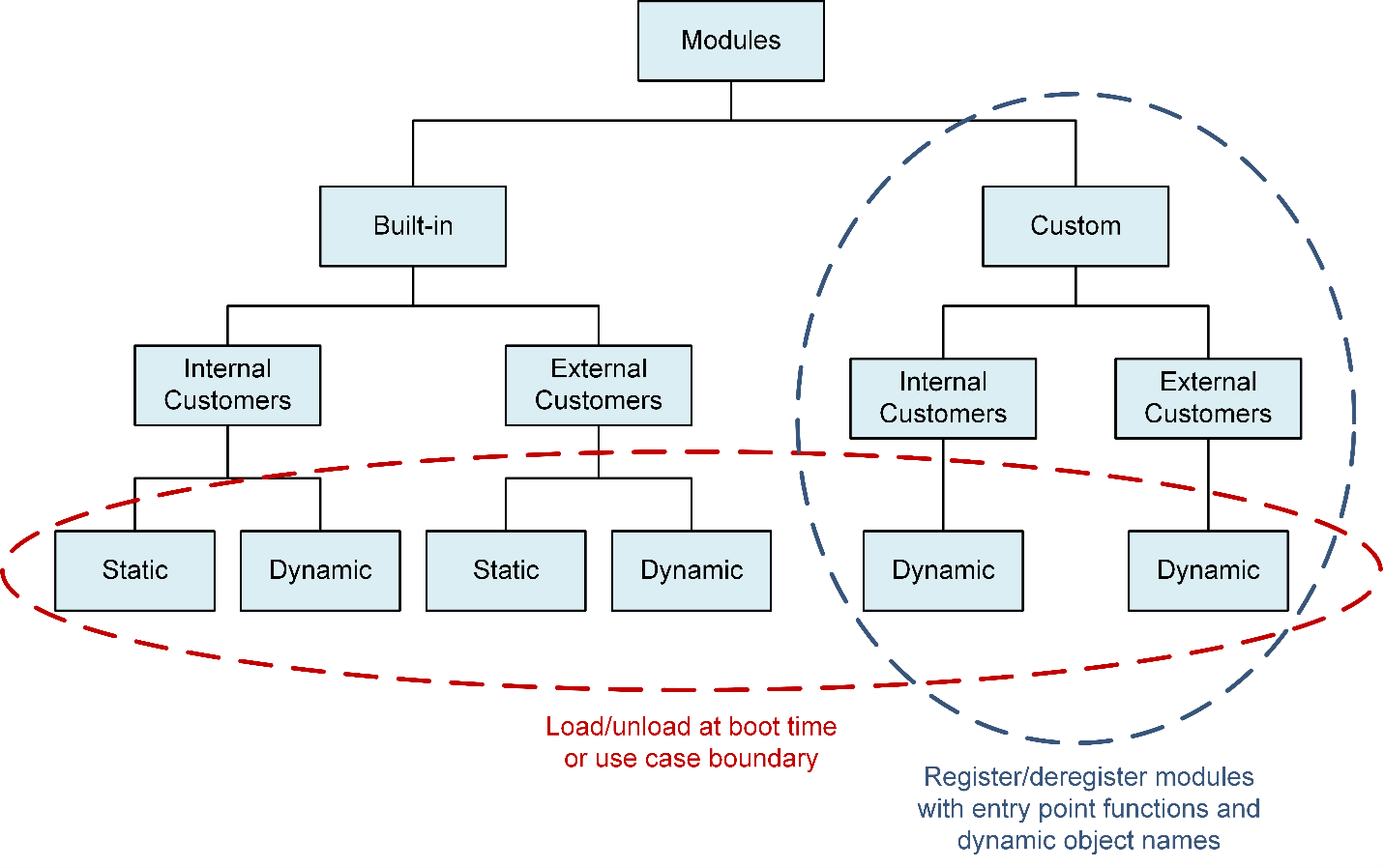
As shown in Figure: Audio Module Data Base
Built-in modules
Modules that are built with the ARE, both static and dynamic objects.
The AMDB uses the module database (module ID, entry point functions in autogenerated .c file) that is generated with the build system, so no separate registration or deregistration is required.
Custom modules
Modules that are built as standalone dynamic objects instead of building with ARE
These modules and dynamic objects must be registered with the AudioReach calibration and configuration tool (ARC) using the custom module integration workflow, which in turn registers them with the AMDB in the ARE.
Static Modules
Static modules are loaded at boot time along with the ARE.
Dynamic Modules
Depending on the memory and latency tradeoffs, dynamic modules can be loaded at boot time or at a use case boundary.
Integrated Resource Monitor (IRM)
The Integrated Resource Monitor (IRM) provides the profiling metrics for different resources in the underlying platform.
The ARC platform displays resource metrics (MIPs, bandwidth, heap usage, and so on) for system designers.
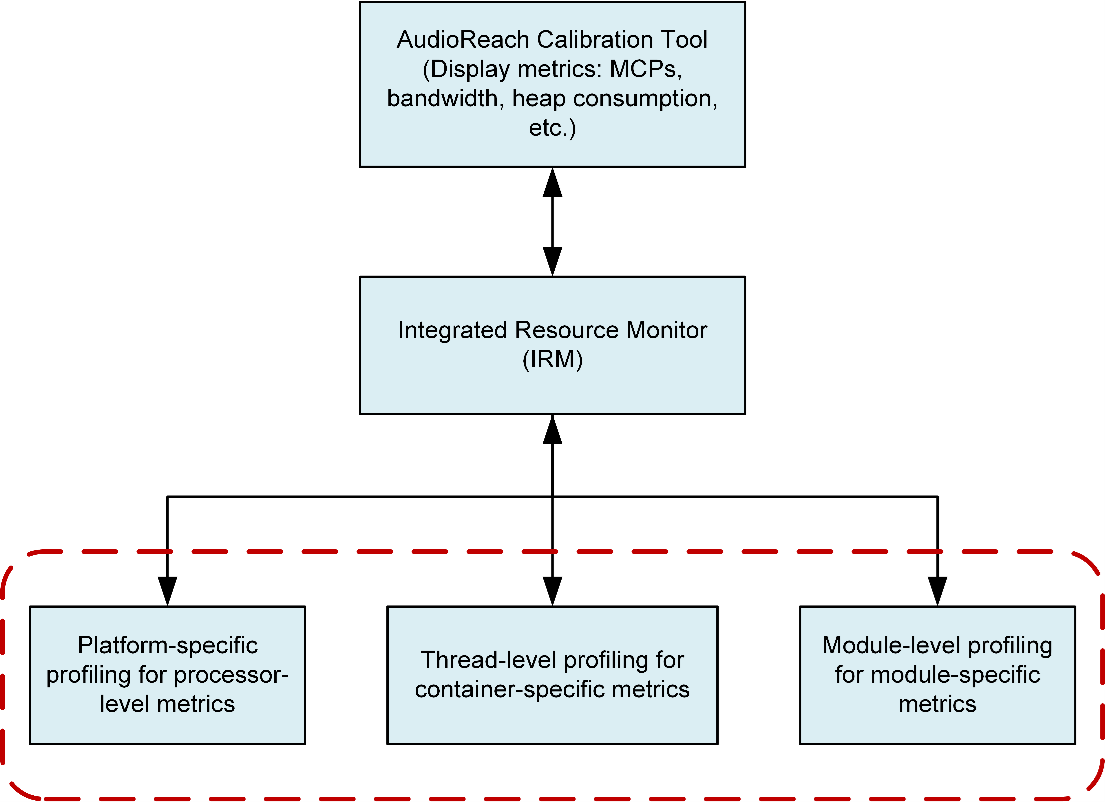
Integrated Resource Monitor
Platform and OS Abstraction Layer
The platform and operating system abstraction layer (POSAL) provides the necessary abstraction to the framework and makes it processor (hardware) or platform (software) agnostic.
Some of the abstractions include, but are not limited to, the following:
Power management
MIPs/MCPs/MPPs and bandwidth voting to select processor and system bus clocks.
Latency voting which could control various performance modes
Custom power domains to achieve various power goals
Processor specific intrinsics to help with optimizations
Memory Management (different types of heap memories, shared memory mapping and so on)
Cache memory operations (clean, invalidate operations)
Conditional and atomic variables
Priority inheritance and recursive mutex, nmutex
Signals and Channels (enables to listen multiple signals)
Interrupts handling
Timers
Software threads (priority-based preemptive scheduling)
Platform specific thread priority data base
Data (PCM or Compressed) and message logging for diagnostic purposes
Calibration and configuration
Calibration and configuration comprise the control information provided to the module at setup and runtime to control the module’s functionality.
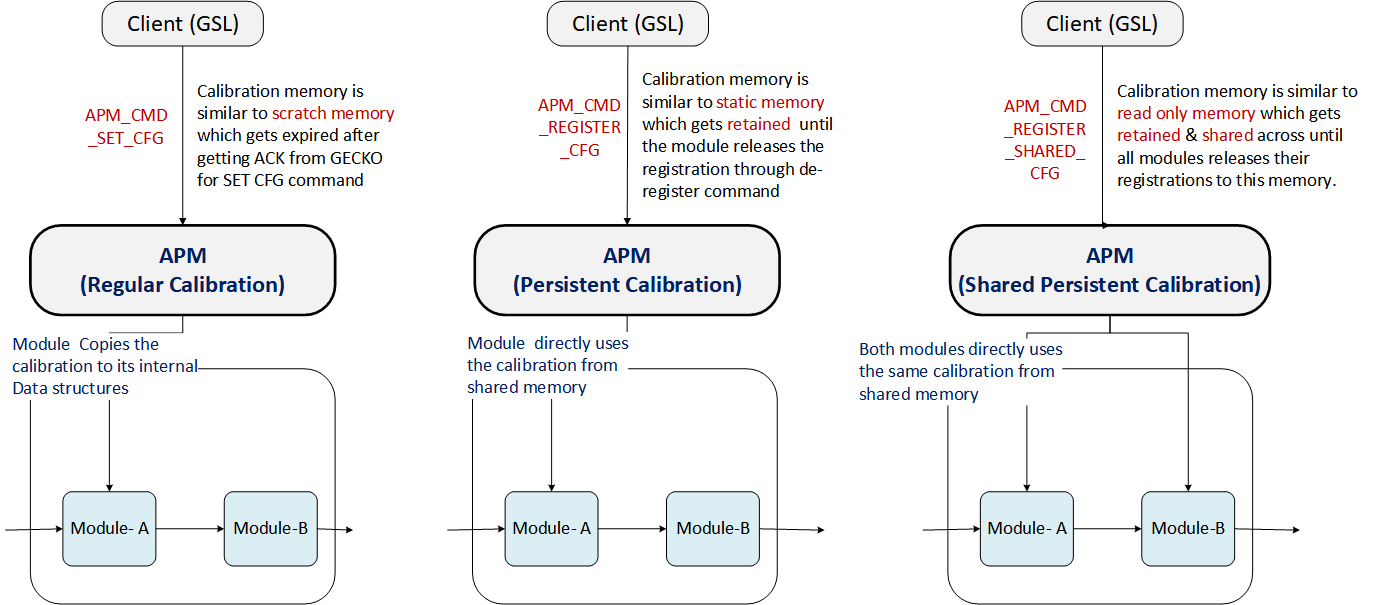
Calibration modes
Following are the three types of calibration interfaces exposed by the AudioReach Engine.
Multi-instance and multi-core
The ARE enables multi-core and multi-instance system configurations with the help of Master and Satellite architecture. These capabilities help in distributing audio processing loads across the processors to achieve functional and performance goals.
Multi-Instance configuration
Use multi-instance configuration for running disjointed and complete use cases in different process domains.
To route a specific use case to a specific process domain, the use case designer must provide the hint (through a routing ID). The GSL uses the routing information and interacts with that process domain ARE (also called the master framework) to realize the use case.
An example scenario is a system where multiple processors are used for different power profiles:
Always ON use cases are routed to a low power processor
Another high-power use case is routed to another processor
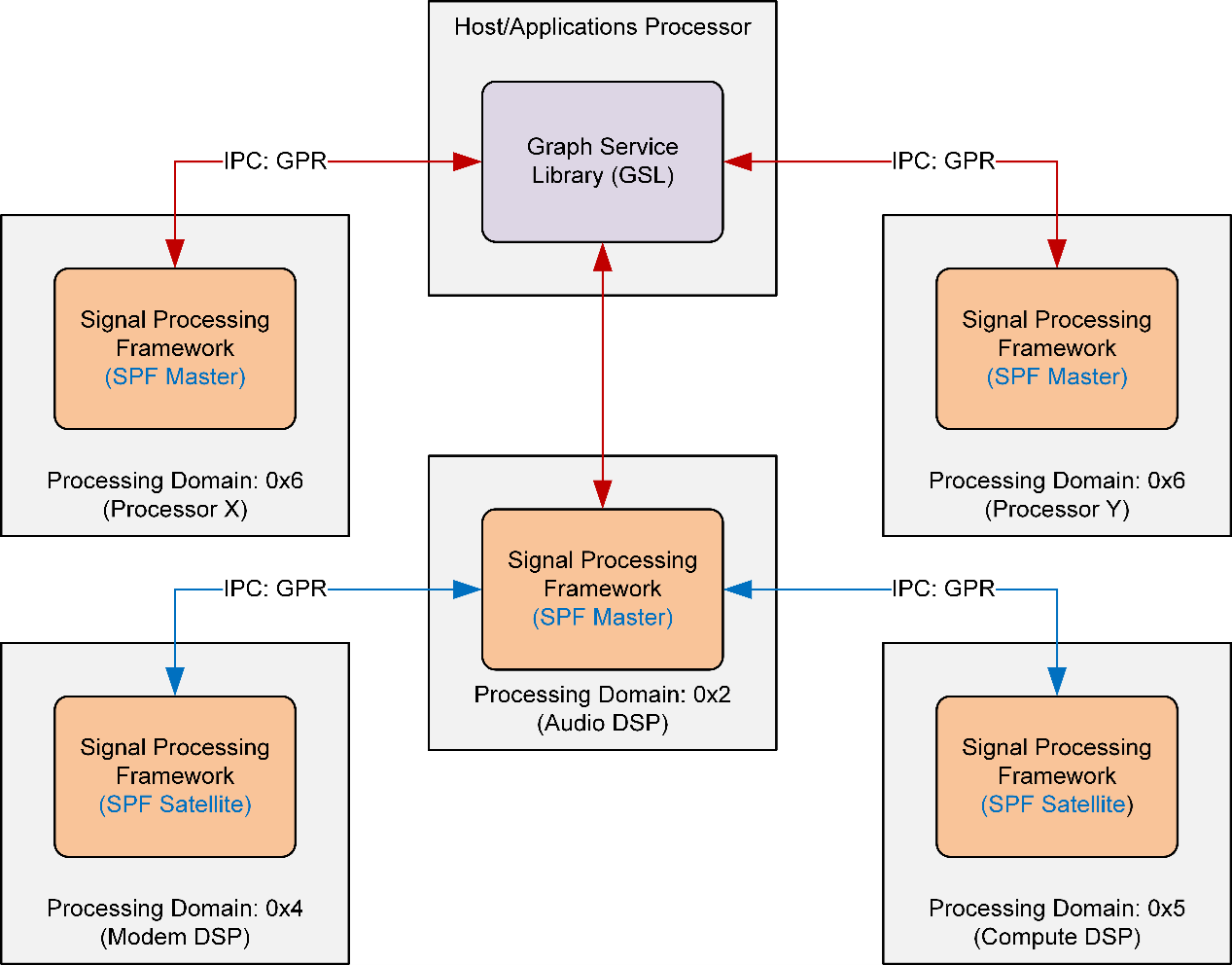
ARE in multi-core and multi-instance configuration
Multi-core configuration
Use multi-core configuration to distribute a given use case across multiple process domains. Like a star topology, each off-load graph originates and terminates with the master ARE.
To avoid additional complexities with data or control synchronization and subsystem re-start mechanisms, there is no communication across the satellites.
The use case designer must provide the hint (by selecting the appropriate process domain) for the modules that are to be off-loaded and distributed.
The GSL provides this use case information to the ARE (Master), which in turn interacts with the required satellite frameworks to realize the use case.
Distributed processing helps utilize the processing resources effectively in the system at the cost of potential latency or power increase. Hence the control of selecting the use cases and modules given to the use case designer (with the help of ARC).
Playback with off-load modules – Use case designer’s view
Both ARE-Master and ARE-Satellite support most of the capabilities across the process domains, excluding any platform-specific capabilities or modules.
Figure: Playback with off-load modules – Use case designer’s view shows the simple playback use case using off-load container to off-load couple of modules into another processor.
Figure: Playback with off-load modules – ARE implementation view represents its implementation view.
Off-load container with shared memory end points inserted in the graph to route the data between master and satellite process domains for the given off-load use case.
This additional hop across the process domains can increase additional latency due to inter process communication overheads and additional buffering between the off-load container and satellite containers to enable the parallel processing.
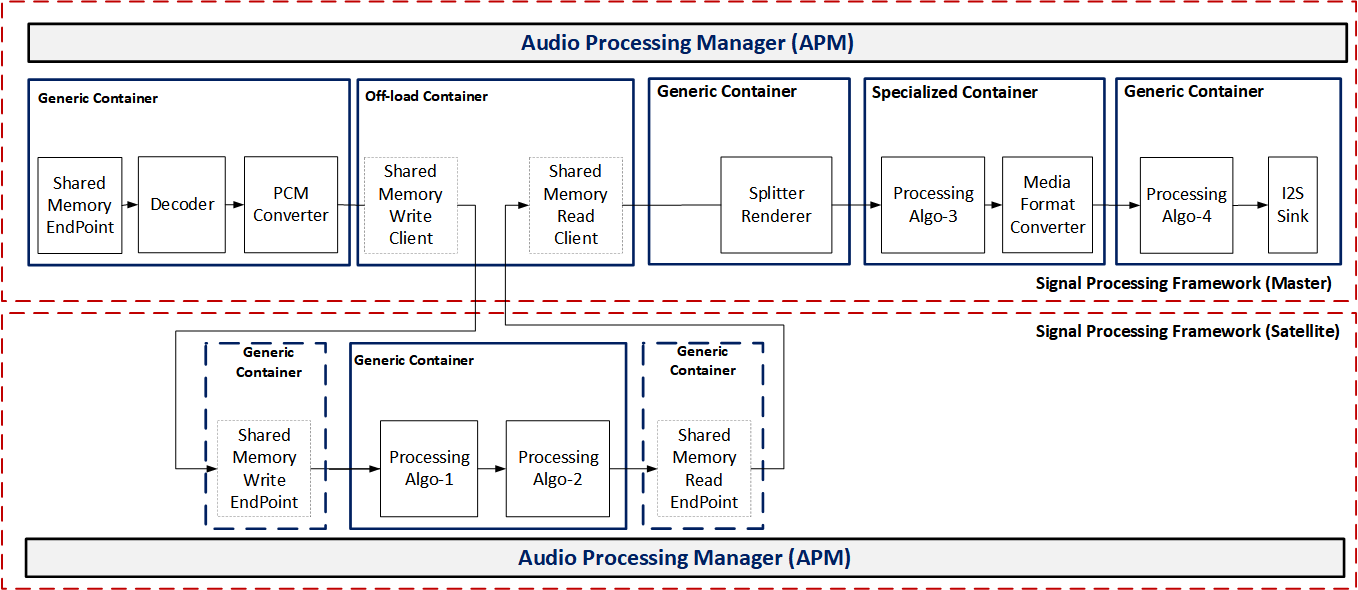
Playback with off-load modules – ARE implementation view
The off-load container is inter-operable with other reference containers. It helps to propagate the metadata, end-of-stream (EOS), media format, and state (START, STOP, SUSPEND) information across the off-loading modules.
Customizations
Custom module
For steps on how to add a custom module, please refer to the How to add an Audio Module guide.
Custom container
The custom container development workflow involves the following steps:
The custom container must use the internal messaging APIs defined between the APM and containers to set up, configure, start, stop, suspend, and tear down the graph.
The custom container must use inter-container messaging to make it inter-operable with other reference containers.
Develop the custom container per the above guidelines, with specified scheduling policies and performance requirements.
Update the supported module headers with this new custom container.
Update the internal container data base tables with entry point functions so the APM can create the container during use case setup.
Update the APM API header file with the new container type, and regenerate the API XML file (using the h2xml tool).
Import the API XML files into the ARC platform to see the new container and supported modules for creating use case graphs.
Use cases
This section lists some common use cases that are realized using AudioReach. NOTE: This is not an exhaustive list.
Playback
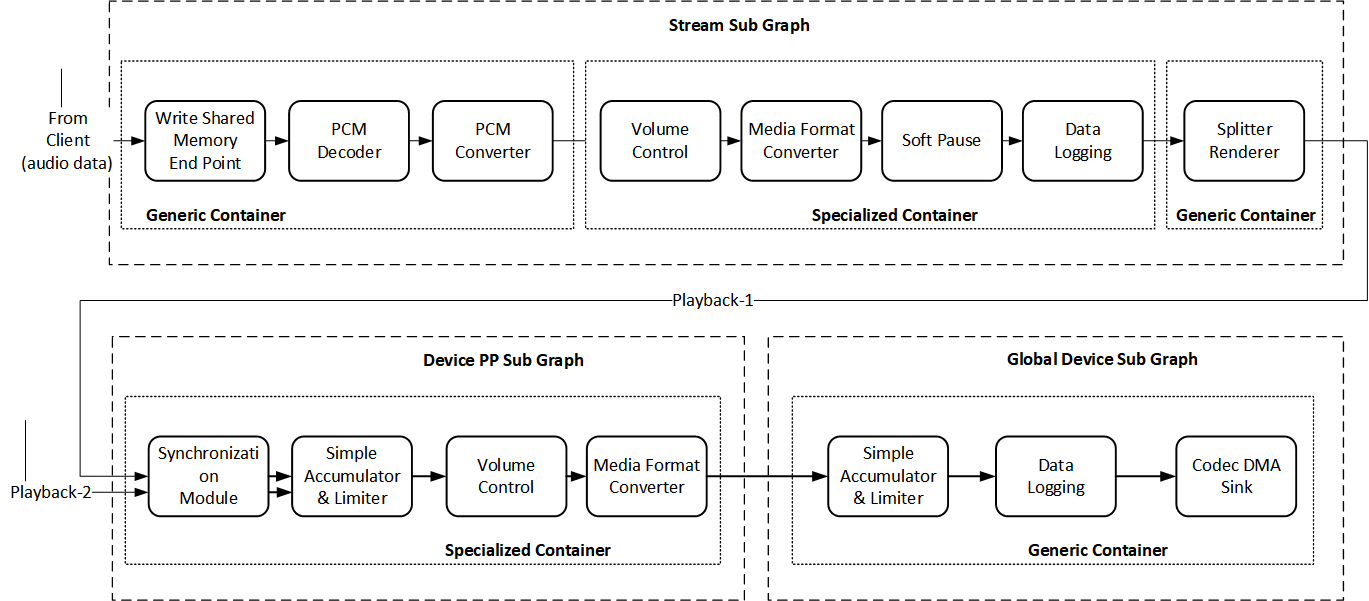
The playback use case is the most common audio use case and it involves decoding, postprocessing, and rendering. AudioReach software is data-driven and doesn’t assume anything about the graph shape or its contents as that is up to the designer, but the following diagram serves as an example.
The graph is divided into 3 subgraphs: stream, device PP, and global device. This structure aligns with how audio playback is controlled in a handset product. The global device subgraph gets data from low power streams as well as low latency audio streams + voice call. The device PP subgraph does device specific processing, e.g., multi-band DRC. The stream subgraph contains decoder, stream-specific processing and audio‑video synchronization control. During device switch, e.g., from handset to headset, the device subgraph can be swapped with another variant.
The following diagram also shows 5 stages of processing. Various stages help in achieving pipelined processing, thus distributing the load on multiple threads. These stages are designated as containers, each of which runs in its own software thread. Typically in a low power configuration, all containers run at 5 ms frame size whereas the codec DMA sink container runs at 1 ms frame size. Any frame size ≥ 1 ms is allowed.
The first container involves receiving data from the client through a write shared memory end point, getting the data decoded (any decoder such as AAC or MP33 can replace the PCM decoder), and followed by PCM conversion, such as bit-width conversion to deinterleaved format for subsequent processing.
The second stage contains stream-specific processing such as volume control, media format conversion, e.g., sample rate conversion. Data logging can be placed at any place in the graph for debugging purposes. The soft-pause module helps ramp up or down during pause or resume.
The splitter renderer can split the stream synchronously on multiple devices (if needed), and also computes session-time for AV sync.
Device postprocessing is where multiple concurrent streams can be mixed and further postprocessed. Before mixing using simple accumulator and limiter, the inputs are synchronized using a sync module. In the global device SG, further mixing is possible (with low latency audio) and ultimately, the data is rendered through the codec DMA sink module.
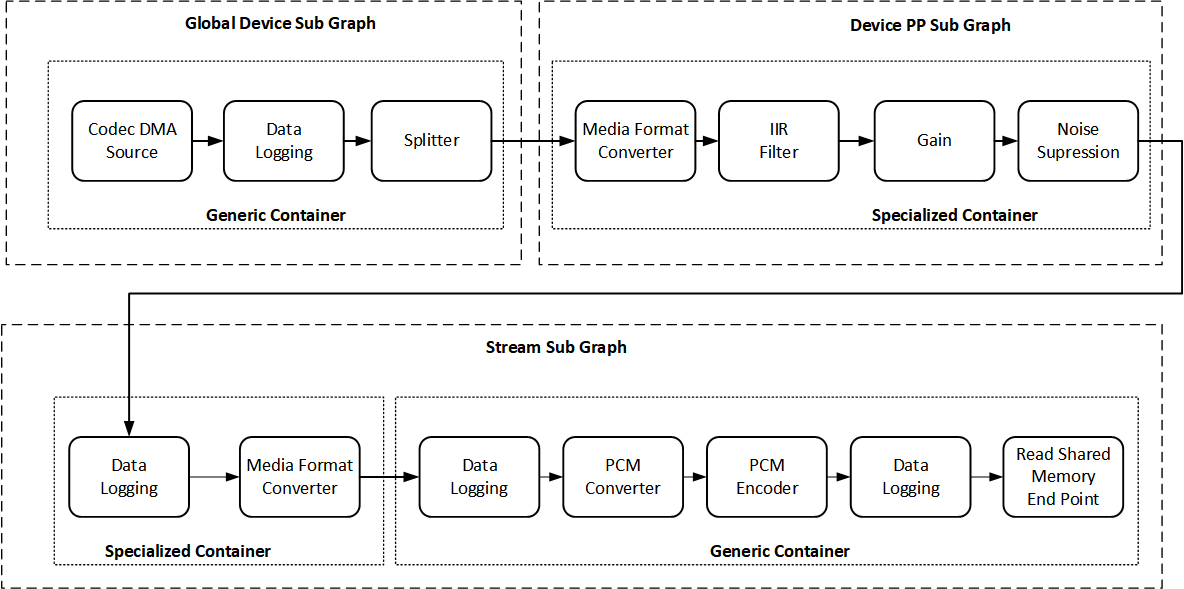
Capture
The following capture path contains 3 subgraphs and 4 containers. The data from the hardware received through the codec DMA source is passed through several stages of processing and is ultimately read by HLOS through a read shared memory end-point.
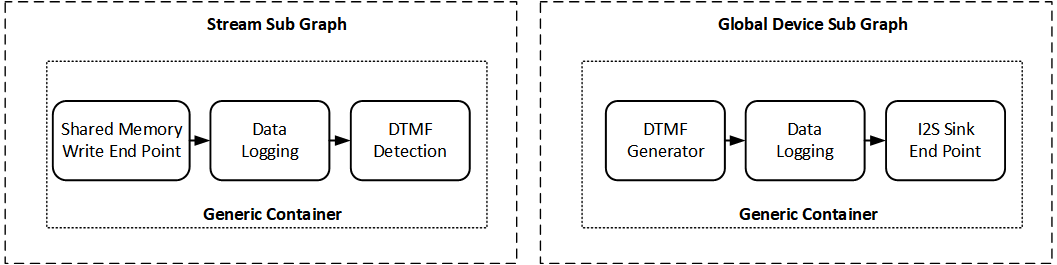
Use cases with source and sink modules
The following example graphs contain source (DTMF generator) and sink (DTMF detector) modules.
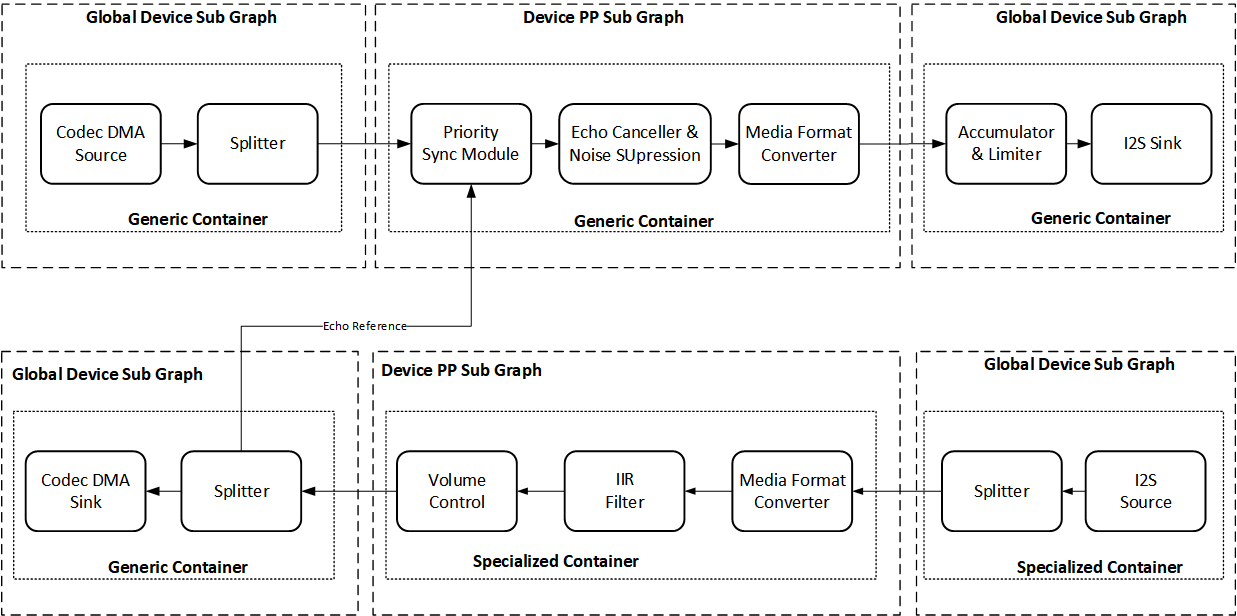
Hands free profile (HFP)
The following HFP graph contains 2 loopbacks between hardware source to hardware sink. There’s also a feedback path for EC. The top graph is the mic path on the local device being sent to Bluetooth (connected through I2S). The botton graph is the speaker path where BT data coming from I2S is rendered on the codec DMA sink.
Voice activation
The voice activation use case involves receiving mic data and running it through a voice activation module after preprocessing for noise. The history buffer stores large amounts of pre-roll data (> 1 sec). This data is released to second stages running on the client whenever a keyword is detected by the voice activation engine. The 2 modules communicate through the control link. This graph consists of real-time as well as non-real-time processing.

Graph designer FAQ
Use case graphs must satisfy both functional and performance requirements simultaneously. Graph designers typically focus on functionality and don’t realize the importance of proper graph shapes on performance. An improper graph can consume extra cycle overheads or consume additional memory. This chapter describes aspects related to graph drawing. More information is available in CAPI Module Development Guide.
How many subgraphs to draw?
A graph for a given use case consists of one or more subgraphs. Signal Processing Framework (ARE) is agnostic to subgraphs. Subgraphs are drawn based on how a client wants to control the graphs, e.g., a device-switch use case demands stream vs. device subgraphs.
How many containers should I use?
Containers like GC and SC are data processing threads (a custom container may have multiple data processing threads, but this guidance only considers GC and SC). Data processing threads typically run periodically based on their frame duration, e.g., the end‑point may run every millisecond, device PP may run every 5 ms, or a decoder may run every 21.33 ms (1024 samples at 48k), so one reason to use different containers is to handle difference in frame durations.
Even for a given frame duration, you may want to use different containers for the purpose of load balancing. This is true especially with Hexagon processor which supports multiple hardware threads. Having multiple containers helps in utilizing the hardware threads concurrently, completing the job faster and allowing longer sleep durations between frames.
Signal triggered modules are interrupt or timer driven. Currently only one signal triggered module is supported by one container. Further, some modules are supported only in certain container types, e.g., encoders are supported only in GC.
Using lot of containers can increase memory requirement due to stacks, instance memory, and buffer memories. For every stage of a container, double buffering is typically added. This might increase data path latency. More containers also means more MIPS used on overheads.
Occasionally, subgraph boundaries may influence the number of containers needed, e.g., an ultra low latency (ULL) stream being rendered on 2 devices: handset and speaker. It’s possible to have ULL stream SG in an end-point container in a standalone use case. However, if there are 2 end-points using different containers if we host stream-SG in device containers, then during device switch the stream will also be torn down; since this is not acceptable, we need to put stream-SG in its own container.
For very low frame sizes (≤ 1 ms), cycle overheads might be lowered when there are no subgraph boundaries within a container. To elaborate consider graph, [{A->B}->{C->D}], in this graph square brackets denote container boundaries. Flower brackets denote subgraph boundaries, and A,B,C, and D are module instances. There are subgraphs within the container. However, in this graph: {[A->B->C->D]} there are no subgraph boundaries within a container. This graph {[A->B]->[C->D]}, also doesn’t have a subgraph boundary within a container.
Should I use SC or GC?
Some modules are supported only in GC and some may be only available in SC. The h2xml of the module specifies the supported container type.
The generic container can satisfy most requirements, except:
Power optimizations for chain of PP modules in mobile use cases
Special synchronization requirements, such as smart sync for voice calls
Back-to-back rate matching or fractional resampling modules, i.e., sample slip > MFC doing fractional resampling
If you have only PP modules (including sync, SAL, splitter, EC, filters, effects etc), using SC is recommended. GC support for PP modules is to be exercised mainly when those modules have to work alongside other modules which are supported only in GC.
How can I improve efficiency?
Memory, MIPS (overheads), and latency are some KPIs that cannot be improved unless efficient graphs are used. Some general guidelines are:
Keep the optimum number of containers
Some graphs have additional containers that don’t serve any purpose. Combine containers if possible and if that’s more optimal
Remove unnecessary modules
Each module in a graph adds an overhead (MIPS or memory) by its presence
Even disabled modules may cause additional overhead
Question the need for every module in the graph
Remove any unnecessary connections between modules
Reduce media format conversions by trying to reorder the modules
Lower the frame duration, increase the MIPS overhead.
Keep only necessary modules at lower frame sizes. Use longer frame sizes if delay is not a concern
Signal triggered containers are generally more optimal in terms of MIPS, because scheduling policies used in signal triggered containers
Use ARC Online mode to confirm that only the modules intended for a use case are running when your use case runs. Sometimes HLOS might launch background graphs which may not be desired. Use the ARC IRM tool to measure MIPS and memory at various levels (overall processor, use case, or module level)
More module specific guidelines can be referenced from CAPI Module Development Guide
Acronyms and terms
Acronym or term |
Definition |
|---|---|
ACDB |
Audio Calibration Data Base |
AMDB |
Audio Module Data Base |
APM |
Audio Processing Manager |
CAPI |
Common Audio Processor Interface |
GC |
Generic Container |
GSL |
Graph Service Library |
ICB |
Inter-container buffering |
IPC |
Interprocessor communication |
IRM |
Integrated Resource Monitor |
NRT |
Non-Real Time |
OLC |
Off-load Container |
Opcode |
Operation code |
POSAL |
Platform and Operating System Abstraction Layer |
RAT |
Rate Adaptive Timer |
RT |
Real Time |
RTOS |
Real Time Operating System |
SC |
Specialized Container |
SDK |
Software development kit |
ARE |
AudioReach Engine |
ARC |
AudioReach Creator |
SPF |
Signal Processing Framework |
VoIP |
Voice over IP |